

 |
G1 Edu旗舰版参数 |
|
 |
Aelos Smart机器人 |
|
 |
国内首款可跳跃,可适应多地形行走的开源鸿蒙人形机器人 |
|
 |
具有开源性与拓展性的AI展示平台及ROS应用平台 |
|
 |
机器人搭载STM32、Raspberry Pi-4B双运算系统, |
|
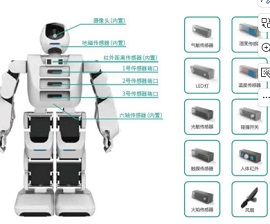 |
机器人内置传感器模块,包含摄像头、六轴传感器、 |
|
 |
产品搭载激光导航、深度视觉、超声波等多种传感器,具有场景建图和路径规划功能,在全局环境中确定自身位置和航向,实现自主导航,并通过自身传感器感知外界环境,实现自动避障 |
|
 |
单臂复合机器人教学科研平台,可实现机器人建图导航、路径规划,机械臂运动学、动力学、轨迹规划、视觉识别等算法和应用,提供丰富的控制案例和开放式的软件框架,支持用户针对使用场景进行应用开发 |
|
 |
育平台主要应用于科研教育,提供尽可能多的学习资源、方便的使用软件、开放式的二次开发接口 |
|
 |
机器人视觉分拣套件是睿尔曼智能面向教育领域打造的全新一体化视觉学习套件 |
|

| 共25条记录 页次:1/3 每页:10条记录 1 [2][3] : |
